Merge clouds and level3D density
|
|
This dialog allows to lump together in an unstructured point cloud an arbitrary set of point clouds, structured or not. The resulting cloud, however, will not contain all points from the input clouds, but only those needed to guarantee a fixed 3D density of the points. |
Regularize the density of your clouds
Laser scanner data can have quite irregular 3D densities. For example, objects very close to the laser scanner may be sampled at one point each half millimeter, but objects far away from the scanner may be sampled at one point each 30/40 cm. This tool allows you to regularize the 3D density of your clouds. The resulting regularized cloud can then be used for meshing or for exporting in CAD tools for further analyses.
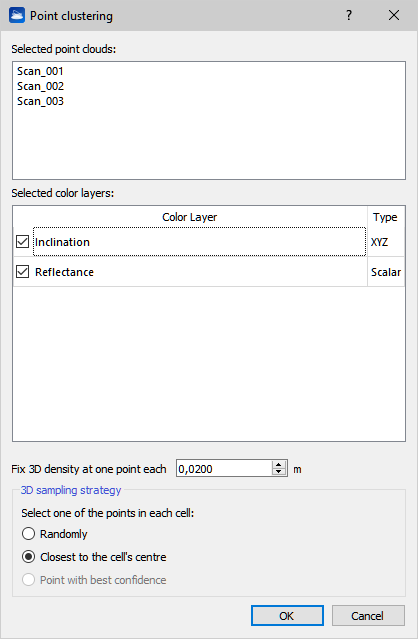
The selected clouds appear in the top list of the dialog. Below, the common color layers across the clouds are found. The cloud that results from the clustering will contain only the color layers that are present in all input clouds and that are chosen. Point normals will be transformed so that they will be correct in the resulting cloud.
Options
In the lower half of the dialog, some options are present. The first is of course the desired 3D density, expressed in minimum point-to-point distance. Then, you can also select the strategy for choosing the representative point of each 3D cell (defined by edges equal to the set 3D density - center point-to-point distance):
- Randomly: the point will be randomly chosen between the points within each 3D cell volume
- Closest to the cell's centre: the point will be randomly chosen between the points within each 3D cell volume
- Point with best confidence: the points with higher confidence will be chosen