Calibrate Camera Intrinsics
If you’re using an external perspective camera (not connected to the laser scanner system) to calibrate high definition photos on grid point clouds, it could be necessary to create a specific calibration of the camera, save it and use it for future purposes.
Here is showed the procedure to calibrate perspective cameras intrinsic (or internal) parameters using multiple checkerboard images as calibration samples.
- Print the calibration frame
- Fixed it on a rigid support
- Measure the high and length of the square
- Select the camera and the lens you want to calibrate
- Acquire at least 10 images (to have a robust estimate for the calibration parameters) of the frame changing the camera position, paying attention to include all the frame squares in the picture, in order to reduce the image without the frame and to avoid glare effects
- Create a new Reconstructor® project then enter in the command Tools → Color tools → Calibrate Camera Intrinsic
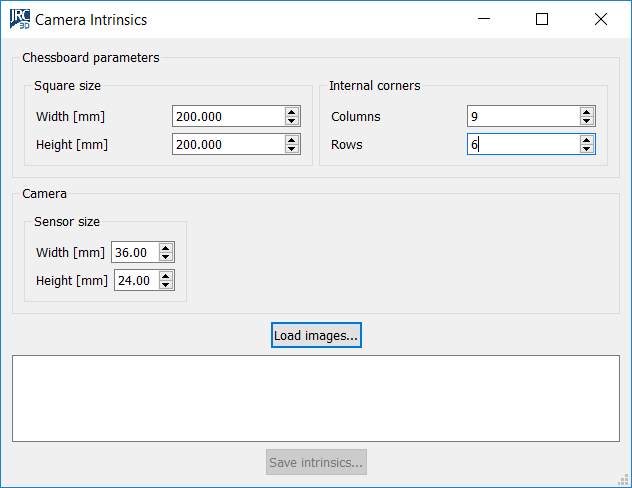
- Set the square size and the number of internal corners and load the frames images
Chessboard square size: the width and height in millimeters of a single chessboard square;
Chessboard internal corners: the number of corners of the chessboard, the border corners should not be taken into account;
Camera sensor size: the width and height in millimeters of the camera sensor. Refer to the camera technical documentations to obtain this data.
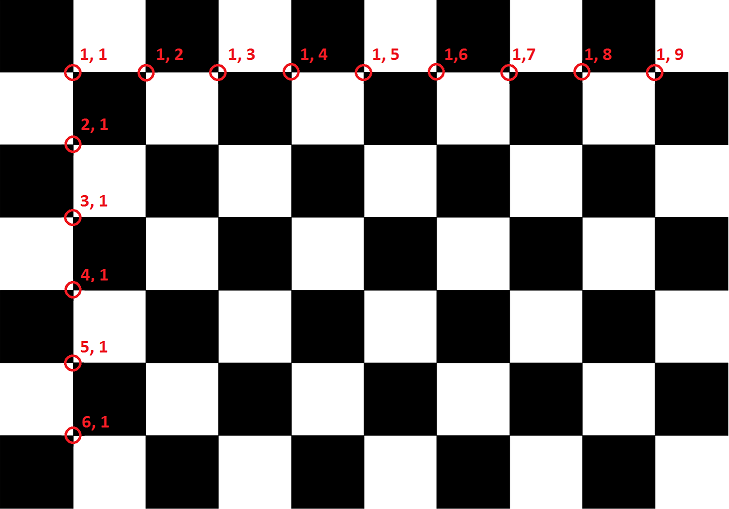
In this sample image, a chessboard with 9 by 6 internal corners is shown. Please note that, in order for the algorithm to work properly, the number of row and column corners must be different.
- Calibration process starts automatically
- At the end of the calibration process, check the mean re-projection error to verify the process quality
- Press “Save intrinsic” to store the calibration file (Internal-Calibration.cal) usable for all the other pictures
Once the calibration is complete, a calibration file can be saved. Such file can be used as a starting point for camera parameters while using the camera calibration function. Inside the Camera calibration on a grid dialog, select External and load Internal calibration file just created.
|
|