Import Point Clouds
To quickly import data, just drag and drop the files you want to import anywhere in the 3D scene. A wizard will appear to ask you for import options.
Otherwise you can use the Import Point Clouds button in the LineUp top toolbar.
If you're opening one or more point clouds by drag&drop (or by a LineUp® Scan Processing Wizard will appear. |
|
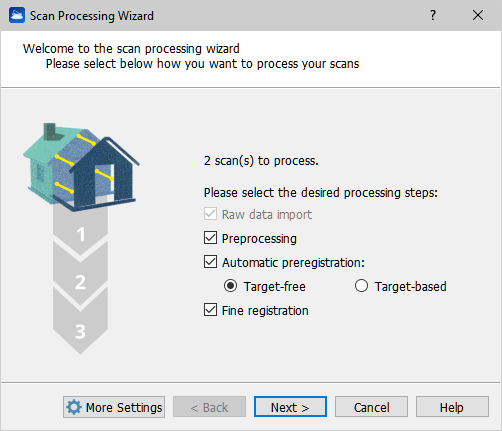
By default you can follow wizard instructions step by step, in order to import, preprocess and register the scans, but if you only want import raw data you have to uncheck Preprocessing, Automatic preregistration and Fine registration.
More information about point clouds import formats here.
More information about LineUp® Scan Processing Wizard here.
Clicking on More Settings button a LineUp Settings Dialog will appear.
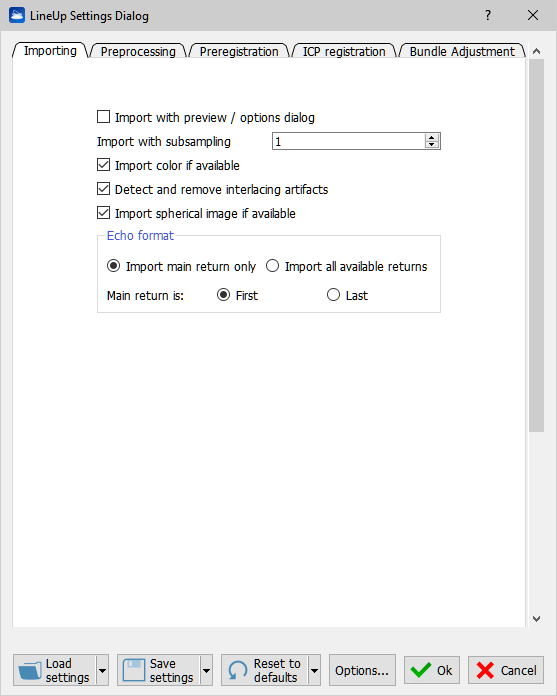
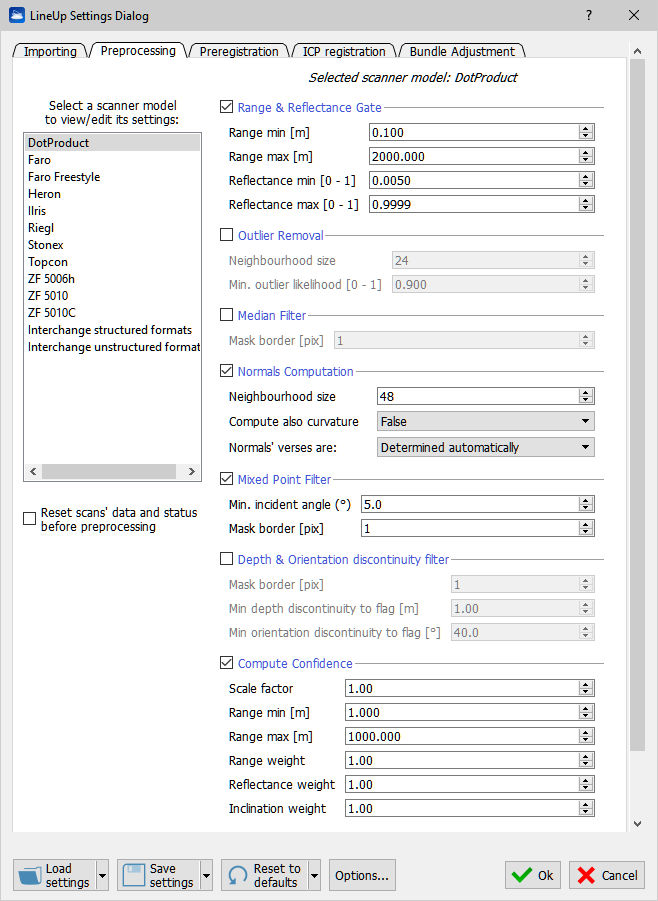
In this phase you have to pay attention to Importing and Preprocessing folders:
|
You have simply to choose the subsampling rate. Depending on your data format you can evaluate several import options, as color or multi echoes. |
|
Start LEVEL |
You have only to identify your data import format (look at your sensor) and use the default parameters to preprocess (clean and filter) the scans. |
Advanced LEVEL |
Depending on your data format and on your survey you can evaluate several options. |
After closing this setting dialog click on Next and then on Process button.
Import formats
Several formats for Unstructured and gridded point clouds can be imported:
Comma Separated Values (*.csv)
DEM ASCII header+matrix (*.asc)
DotProduct 3D scan (*.dp)
E57 grid point cloud (*.e57)
FARO laser scan (*.fls, iQscan)
Generic binary traster (*.*)
Grid Point Cloud Text File (*.txt)
NcTech file format (*.nctri)
Optech IXF scan (*.ixf)
PTX (*.ptx)
Riegl V Line scan (*.rxp)
Stonex multiple scans (*.x3m)
Stonex point cloud (*.x3s)
Topcon laser scan (*.cl3, *.clr)
Z+F laser scan (*.zfs
E57 unstructured point cloud (*.e57)
FARO Scene project file (*lsproj)
Kubit Point Cloud (*.ptc)
LAS format (*.las)
LAZ format (*.laz)
Optech CMS scan (*.txt)
Optech XYZ scan (*.xyz)
PLY point cloud (*.ply)
Unstructured Point Cloud Text File (*.txt)
PTS (*.pts)