Automatic Target-free Pre-registration
|
|
This dialog enables a very effective and fast procedure that preregisters a set of scans automatically, without using targets or markers. This dialog enables a very effective and fast procedure that preregisters a set of scans automatically, without using targets or markers. Here you can select the unique Reference scan that will be fixed. |
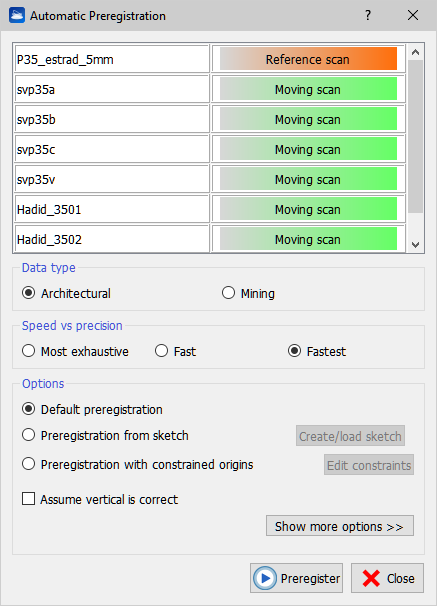
Show more options >>
Features
- No limits on the number of scans to preregister. You can preregister 200 scans at the same time, the software will load at most two of them at a time.
- Easy convergence with automatic search of best overlap. To be registered together, the minimum overlap of two scans is 20-30% of their surface. However, in most cases you don't have to care about it, because of the following: given a set of N scans, the algorithm is guaranteed to find all the scan pairs that match together, and to use the best overlapping N-1 scan pairs to preregister your dataset. You can customize this behavior via the "Maximum distance in scan sequence" option.
- No point density requirements. The algorithm adapts to the specific datasets, being it close-range indoor, or long range territorial data.
- No complicated parameters to input such as cell size or fitting strategy. You only specify if your dataset contains "construction" or "territorial" data: the algorithm will change accordingly the surface elements to look for and to match.
- Very fast because of parallel computing: the algorithm is guaranteed to do all computations in parallel, using all the cores your CPU has (unless you don't tell Windows to assign less cores to Reconstructor®).
- Robust against symmetric datasets. In case of rectangular empty rooms, stairs, or other symmetric datasets, Line Up Pro is guaranteed to quickly let you browse multiple preregistration solutions, and therefore to help you quickly find the right preregistration of your scans.
- Easy to set constraints. You can easily set constraints on the scan vertical. If you know that the scans are already on their vertical (with a confidence of 2-3°), you can tell the algorithm to leave the scans' vertical unchanged. If you don't, LineUp Pro will also esteem the scans' vertical, with the guarantee to correct angles between the given vertical and the correct one of max. 30°. As additional constraint, you can select which of the input scans is the reference scan during the preregistration.
- It works for virtually all datasets. This automatic preregistration technique has been tested with hundreds of different datasets containing from 10 to 200 scans per dataset. It gets your scans in a state of coarse registration without your intervention, or with very few easy corrections at the end.
Parameters
Here we give a top-to-bottom description of the parameters that you can set in the dialog.
- Data Type: here you can specify if your datasets relates more to a construction scene, with many planar surfaces, or if it relates more to a mining/terrain scene, with many irregular surfaces. This will greatly help the algorithm.
- Speed vs precision: this algorithm is designed to be fast in first place, and to deliver a solution in minutes or tens of minutes. We advice to leave this option to “Fastest” and to switch to the other two options only when the first does not work. The other two options indicate the algorithm to search for more matches between smaller surface elements. This leads in general to better results, but in some cases it can also spoil the results because it introduces more candidate matches for the final solution and therefore more ambiguities.
- Preregistration from sketch. By flagging this option, you tell the algorithm that you want to help it by creating a “sketch”, or a drawing with the approximate relative positions of the scans. To create or load a sketch, press the Create/Load sketch button. The Sketch Window opens for you to create the sketch.
- Assume vertical is correct. Some laser scanners feature an internal inclinometer, and therefore they are able to create raw scan data where the vertical is already correct, with an error of 2-3 degrees. If this is the case, then you can flag this option and the algorithm will match the scans without changing their initial vertical. If this is not the case, the the algorithm will also esteem the correct vertical before matching the scans. Please take into account that the maximum error in the vertical that can be corrected is 30 or 40 degrees.
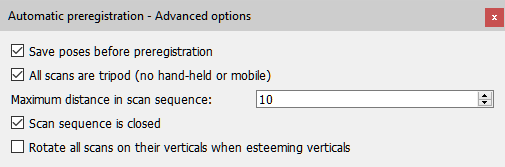
- Save poses before preregistration. If you flag this option, Reconstructor® will automatically save the scans' poses in the Export/ project folder before starting the automatic preregistration. In this way, you will be able to easily go back to those poses before the preregistration, with the function Data management → LineUp → Pose transform → Apply pose from file.
- All scans are tripod (no hand-held or mobile). Flag this command if you're using tripond laser scans
- Maximum distance in scan sequence. This parameter determines how many scan pairs the algorithm will try to match. It specifies the maximum distance in the scan sequence that two matchable scans may have, and it defaults to 10. For example: given an input sequence of 30 scans, Reconstructor® will try to match scan 5 with all the following [nearest], until scan 15. Scan 5 and scan 16 will not be matched because Reconstructor® will assume that they are too far away in 3D, being far away in the sequence. Generally speaking, given an input sequence of N scans and this parameter set to M, then Reconstructor® will try to match scan s only with the M preceding and the M following it in the input sequence, considered as a circular sequence (scanN matches scan 1).