Camera Calibration Using 3D Points
The objective of camera calibration is the registration of photos (perspective or spherical images) with the 3D data.
This process creates photo-realistic texture maps for the 3D model.
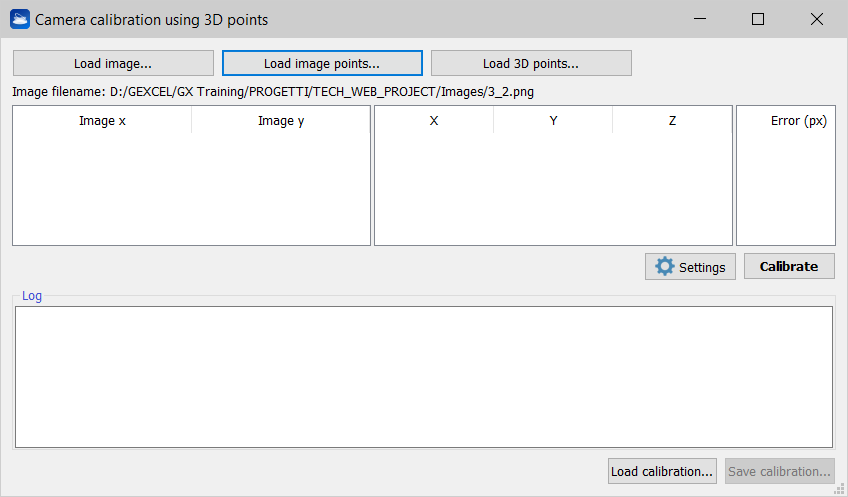
This dialog allows the calibration of a perspective image using a list of matches between camera points and 3D world coordinates points.
As first step, the image to be calibrated must be selected by using the Load Image button. Subsequently image points and 3D points must be loaded using the Load Image Points and Load 3D Points buttons respectively.
Then click on Calibrate to compute the calibration process. The result is shown in the Log panel with the computed field of view of the photo and relative re-projection error. If successful, the calibration and the point pairs can be saved to file by pressing Save calibration. A .cal file is created, in XML format, storing the calibration using calibration parameters.
Camera Calibration Settings
By clicking on Settings, a dialog including all the camera model/calibration settings and RANSAC parameters is opened:
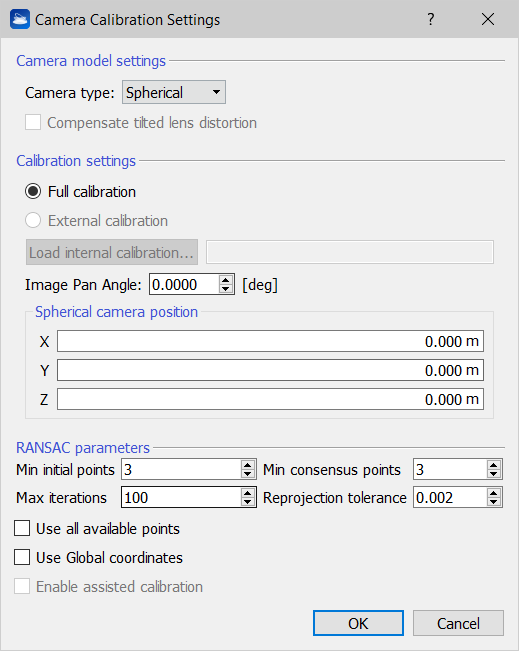
Please refer to the camera calibration page for details about the calibration options.