Photo & Color
Reconstructor® provides several coloring tools to effectively manage the colorization of point clouds and meshes.
These tools can be classified according to the objects you want to color and the procedures you need to apply.
Point clouds' color layers managing
Some color information is item intrinsic of point clouds and saved as a color layer, in addition of the ones already included in the raw data (i.e. Reflectance, Color, ...) or after pre-processing step (i.e. Confidence, Inclination, ...).
By using the tools below listed it's possible to create and add new layers of color.
|
|
To optimize the point clouds color's contrast by histogram stretching. Only single channel layer can be used (reflectance, gray scale layers...). |
|
|
To add to the selected point cloud(s) an extra color layer, representing the altitude of the points with respect to one of the tree axes of the current UCS. |
|
|
To add to the selected point cloud(s) an extra color layer, representing the inclination of the points' normals with respect to a given plane that exists in the project. |
|
|
Color with range |
|
|
Color with ambient light |
|
|
To add to the selected point cloud(s) a special color layer, named 3D Reflectance, that mixes LiDAR intensity and point normals (inclination) to enhance both geometrical and surface characteristics. |
|
|
Add color layer from image |
|
|
Merge or split layers |








A particular and useful tool is dedicated to manipulation of layers of colors:
|
|
To manage an artificial colorization for a given color layer of a point cloud. Color information can be scalar (e.g. reflectance, range, confidence) or vectorial (e.g. inclination). It's also possible to add layers from external images. The purpose of this command is to manage and create an artificial colorization for a given color layer of a point cloud. |

Camera calibration
Images from external cameras can be calibrated (oriented) on point cloud and meshes to obtain colored 3d models (see at the Colorization paragraph).
|
|
Images & calibration This tools are used to calibrate images on point clouds and meshes and to determine the external and intrinsic parameters of a camera: |




Manage projectors
Several kind of 3D projectors can be created in Reconstructor® and used to project images on the 3D scene.
|
|
This functions creates a projector in four different frustum types: Perspective, Orthographic, Spherical and Cylindrical projectors. An additional way to create perspective or spherical projectors is done by a calibration (by importing a Reconstructor® camera calibration file) using a valid image. |

|
|
Load projector To load (light on) the image on the 3D model. |
|
|
Unload projector To unload the image from the 3D model. |


Colorization
A mapping (on point clouds and meshes) of calibrated images from external cameras is possible, in order to obtain colored point cloud and meshes.
|
|
Texture mapping To color point clouds and meshes by using external images (and also extracted panoramic cameras from perspective picture in Reconstructor®)
|




|
|
UAV and imaging This tool is used to Import GeoTIFF as an orthographic camera. |
|
|
|
|
Import georeferenced tif... Imports a georeferenced tiff (GeoTIFF) file as an orthographic camera. |


|
|
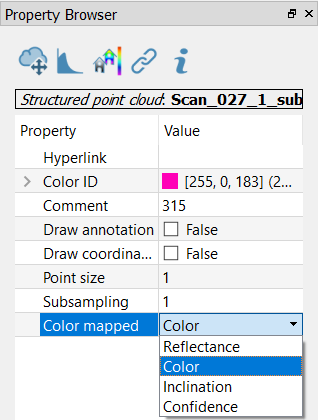
To change the point clouds’ color layers, select the point cloud from the project window and set the Color Mapped option in the Property Browser. |
See also our video tutorials on point clouds coloring.