Point Clouds
There are two different kinds of point clouds in Reconstructor®:
- Structured point clouds (also called grid point clouds, or range images, or scans): scan-based clouds, "fixed-origin" or tripod scans. They include row/column info and the origin scan’s position.
- Unstructured point clouds
Operations available for both unstructured and grid point clouds are:
- Recompute bounding box: useful sometimes when the bounding box is not updated (available only if the model is loaded in memory)
- Histogram: the histogram tool allows to optimize the contrast by histogram stretching (available only if the model is loaded in memory and if the current color type is 1f or 1d, i.e. a high-dynamic single-channel point color)
- Colors mapping: point colors can be remapped to a pseudo colored scale to improve the dynamic range, if the histogram stretching is not sufficient (available only if the model is loaded in memory and if the current color type is 1f or 1d, i.e. a high-dynamic single-channel point color). This tool can be also used for range segmentation and inspection.
- Inclination from plane: if the Inclination color type is available (the model must be pre-processed) the dialog allows to select a plane whose normal is projected to the normals of the model (dot product). The result is added as a 1f color type.
Operations available only for grid point clouds are:
- Edit 2D: edit the grid
- Extract edges: create a polyline from the computed orientation and depth discontinuity during the pre-processing phase. The polylines are as contiguous as possible, adjust the max search distance and minimum edge length to optimize the outcome.
- Cross Sections
- Multiresolution Mesh
- Simplify Points: to determine the most relevant points from a point of view of shape description, saving them into a new unstructured point cloud.
|
|
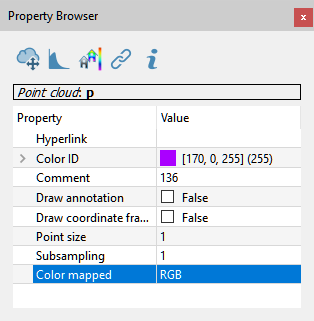
The editable properties - for both of them - are:
|
Advanced notes
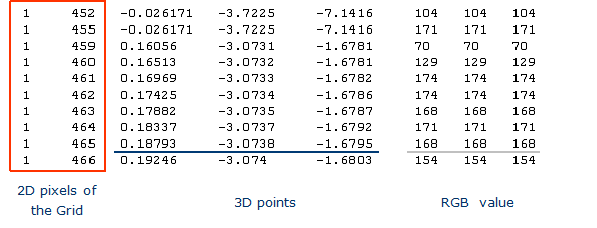
A Grid point cloud of point can be viewed as “image” where the number of pixels (pix) are equal to the number of point the scanner has acquired (valid and invalid).
|
|
|

Point clouds data storage
Data is stored in an XML description file + pure binary vector files. The file extension of the binary data specifies the format, where data.NT: N=num of components (1,2,3,4…), T=data type (byte, short, word, half, float, double).
For point colors, a special 3bc (c stands for compressed dynamic range) file is created for rendering only, for instance after histogram equalization.
For example, the unstructured point clouds myUnstruct will be saved in the following files in the project folder:
- Unstructs/myUnstruct.rup, an XML file containing the cloud's properties
- Unstructs/myUnstruct_rup/points.3f
- Unstructs/myUnstruct_rup/status.1i
- Unstructs/myUnstruct_rup/Reflectance.1f
- Unstructs/myUnstruct_rup/Reflectance.3bc
- …
The grid point cloud myGrid will be saved in a similar way in the folder Grids inside the project folder. Grid point cloud files have extension “.rgp”
An unstructured point cloud, instead, is like an unorganized list of points.