Changes Map
|
|
Select this tool to import a colored point cloud created in the Tracking Odometer step in Heron® Desktop. |

It is only necessary
- to set the path in the browser where the changes map (.ply) is stored (see the Note section at the end of this page for more details)
- to choose to apply the voxelization or not.
Activating the voxelization the point cloud density can be then set in a range of 1 cm ÷ 1 m and the colorization of the points is averaged on colors of points included into each voxel.
Deactivating the voxelization the point cloud and its colorization will be imported as in the original imported file.

Press the Import button to start the parsing process.
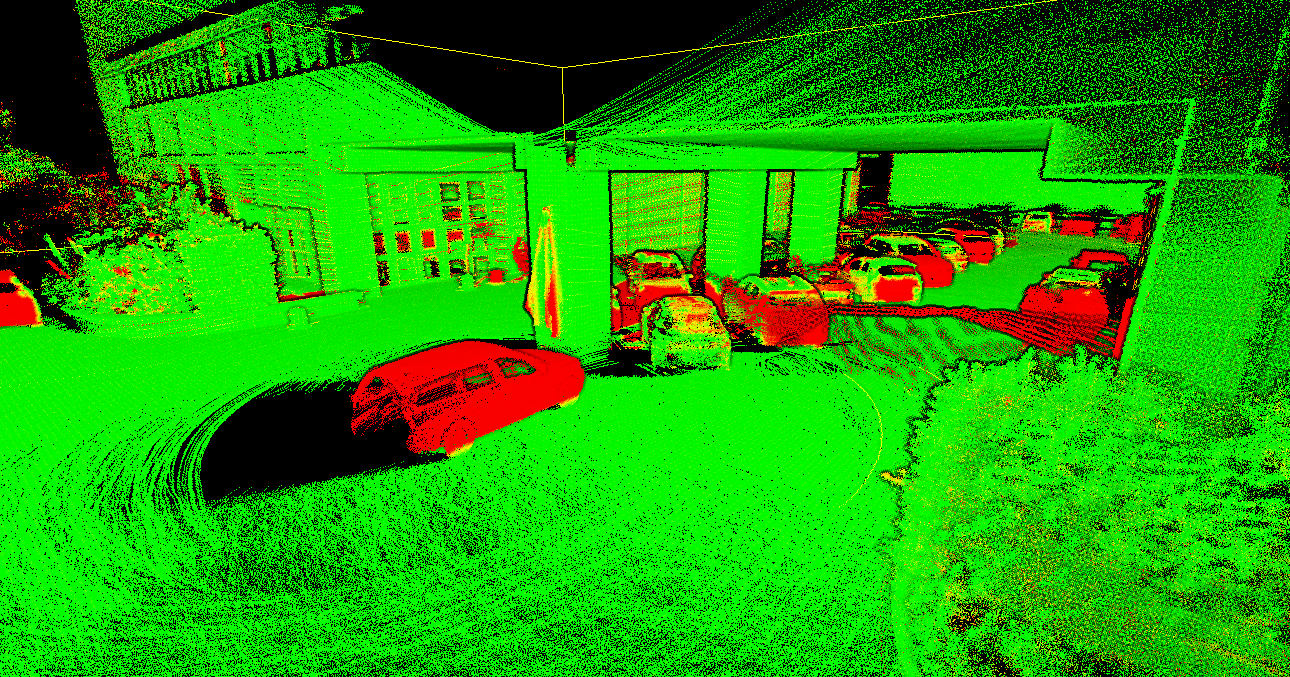
At the end of the process a point cloud with a scalar layer of color named "Changes" will be included in the Reconstructor® Project.
|
|
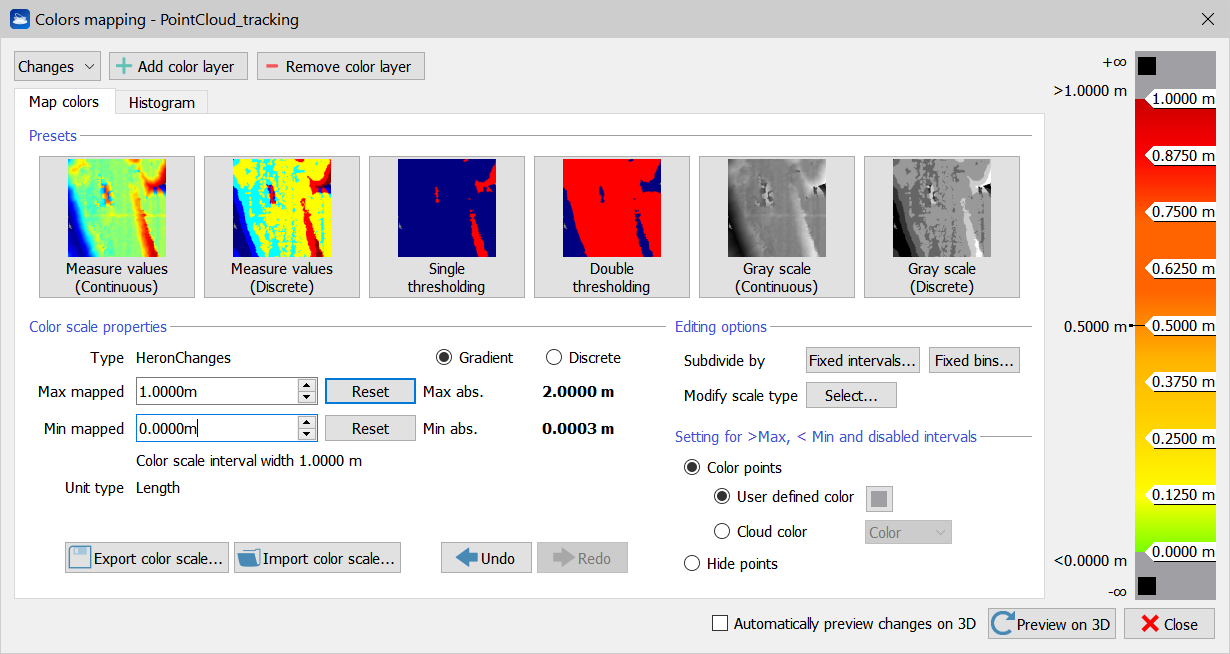
Its colorization and the displayed ranges can be changed with the Colors Mapping tool, where a customized HeronChanges color scale type is available by default. |
Note
![]() Before to run this command it is necessary to follow the next steps to export the colorization of the tracking process in an output point cloud from Heron® Desktop:
Before to run this command it is necessary to follow the next steps to export the colorization of the tracking process in an output point cloud from Heron® Desktop:
|
|