Manage Spherical Targets
|
|
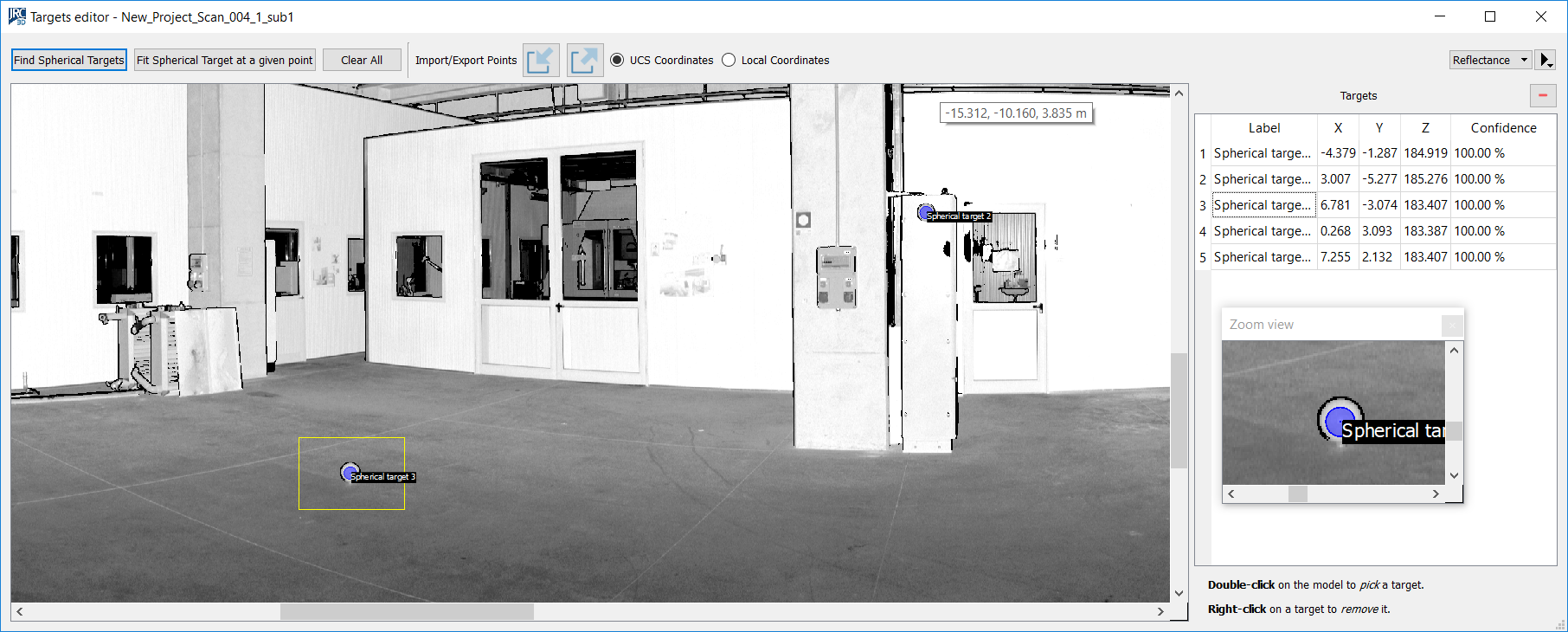
This function opens a customized Targets editor dialog, focused on spherical targets |
Automatic detection of spherical targets
To get quality surveys, scanner operators often place spherical targets on the field; these spherical objects can be automatically detected and used therefore as precise targets for registration. Reconstructor® supports an easy-to-use and fast automatic spherical targets detection algorithm for tripod scans.
It needs only one input parameter (the diameter of the required spheres) and it is robust to errors such as false positives or missed spherical targets.
It is possible to automatically detect spherical targets by going in Line Up, selecting Target-based registration tools and Manage spherical targets, and selecting a grid point cloud.
A dialog appears showing a 2D view of the structured cloud. Click Find Spherical Targets on the top left. A small dialog appears where you can input the diameter of the spherical targets you are looking for. The default value is 14.5 cm. After inserting the diameter, Reconstructor® automatically finds all spherical targets in the given point cloud, and displays a dialog with the number of found sphere, the average sphere fit error (the average distance of the inlier points to their own sphere) and the elapsed time. After clicking Ok, the targets list on the right of the dialog gets populated with the found spherical targets. Just click on any target on the list and you will see the corresponding sphere in the Zoom View: this is useful to check whether any false positive has been detected.
Accessibility and workflow
It is also possible to detect the spherical targets for a set of grid point clouds, by selecting them, then selecting Pose & registration and Targets registration. By doing so, the Target-based registration dialog appears. Uncheck the Detect circular targets checkbox, leave Detect spherical targets checked, select the desired spherical targets diameter, and click on Detect targets on bottom left. The spherical targets will be automatically detected for all the listed clouds, erasing any target previously belonging to the clouds.
It is also possible to detect the spherical targets as a step in the Line Up Wizard. For example, you can import a set of tripod scans, pre-process them, detect the spherical targets, and run target-based preregistration on the clouds: the wizard will perform all these steps automatically for you. Just open the Line Up Settings and go to the Preregistration tab to adjust the desired settings for the steps of sphere detection and targets registration.
Regardless of the way you access the algorithm, after its execution Line Up’s log window shows you how many spherical targets have been extracted, what is the average fitting error of the inliers to the found spheres, and what is the elapsed time. The average fitting error is a useful information to understand the degree of precision that you can expect by running target-based registration exploiting the found spheres.
Conditions and limitations
To be able to detect a sphere, the algorithm needs at least 30 points lying on the sphere. where each points has a scale of 13 mm. For example, if a 360° tripod scan has a width of 8000 points, at 18 m away from the origin there is a point every 13 mm. The closer to the origin the sphere is, the more points needed to detect it. However, you can still detect spheres with fewer points than required by using the Find spherical target at a given point button, described in the former section.