Pose
|
|
The command is available in the Data Management > LineUp Top menu and in the item's context menu Pose&Registration. |

In Reconstructor®, the 3D position of each object (except annotations) is described by the pose matrix (transformation matrix).
You can manage different UCS systems (local or global/geo-referenced).
A transformation matrix defines how a project entity is located and oriented with respect to the current UCS. Therefore, having knowledge about transformation matrices, it is possible to perform specific and precise translations and rotations on a project entity.
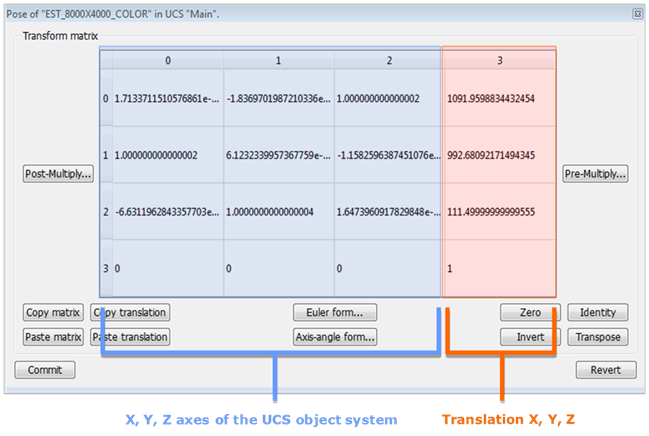
A transformation matrix is a 4x4 matrix that specifies how an object O is located and oriented with respect to a global coordinate system. The first, second and third column of the transformation matrix contain respectively the versors of the X, Y, and Z axes of the system anchored with the object O. The fourth colum contains the translation vector of O's origin with respect to the UCS' origin. The fourth row of the translation matrix is always (0 0 0 1).
See also Manual positioning (Adjust Pose).
You can restore an object position in case of registration and geo-referencing error once the Pose file is saved.
To save the Pose you have to export it:

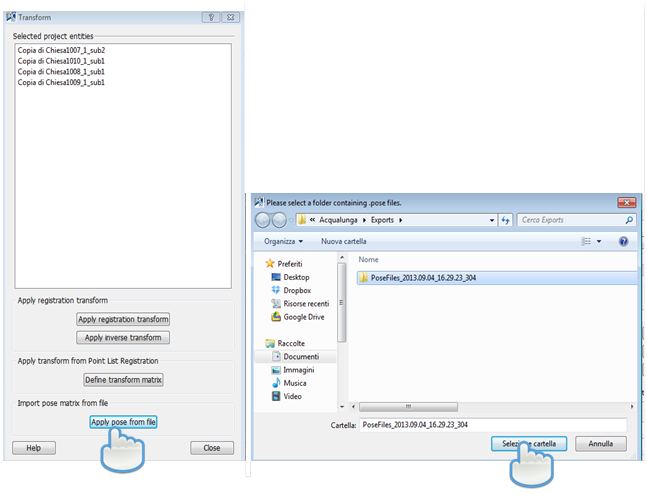
The software automatically creates a folder PoseFiles_2013.09.04_16.29.23_304 that contains the Pose exported. This folder is saved in the Exports folder and the name contains the date (day and time) of the creation.
Apply the Pose file by selecting the objects desired → right mouse button → Pose&Registration → Pose transform.

A window appears. Select Apply Pose from file and select the Pose you want to restore.
![]() Items must have the same name of the pose file to apply pose.
Items must have the same name of the pose file to apply pose.
Advanced Options

This dialog is designed for advanced users, since it requires specific knowledge of 3D computer graphics, in particular knowledge about transformation matrices.
In the dialog there is a central 4x4 table displaying the transformation matrix of the current project entity. On the sides, the buttons Post-multiply and Pre-multiply are located.
If M is the current matrix, a pre-multiplication by matrix P is defined as
M’ = M ∙ P
If M is the current matrix, a post-multiplication by matrix P is defined as
M’ = P ∙ M
Any number of pre-multiplications or post-multiplications to the current matrix is possible.
Confirm any modification of the matrix by pressing Commit on bottom left of the dialog. Press Revert to discard any modification. The upper-right Close button (x) has the same effect as Revert and hides the dialog.
To speed up the definition of the matrix the following operations are available:
- Copy in clipboard: copies the current matrix in the clipboard, useful for export or to paste it to another model
- Paste from clipboard: pastes the matrix from the clipboard, confirm by pressing Commit
- Euler form: define the transformation as rotation plus translation. The rotation is defined as a sequence of rotations along the local coordinate frame axis. The Pitch angle is around X, Heading is around Y, Roll is around Z, in degrees. If the sequence is YXZ, then first the rotation around Z(Roll) is applied, then X(Pitch), then Y(Heading). Press OK and the homogeneous transformation matrix is computed.
- Axis-angle form: define the transformation as rotation plus translation. The rotation is around the desired axis (X,Y,Z) direction by amount Angle, with the right hand curl rule. Press OK and the homogeneous transformation matrix is computed.
- Zero: clears the matrix to zero
- Identity: defines the matrix to be the identity
- Invert: inverts the current matrix
- Transpose: transposes the current matrix
For example
|
Rotation around X axis by 90 degrees
|
Rotation around Y axis by 90 degrees
|
Rotation around Z axis by 90 degrees
|
Move objects with the Rototranslation Matrix

Copy Translation button: To copy the object translation (column 3).
Use this option to translate an object on these coordinates.
1. Press Copy Translation
2. Open the Pose of the object to move
3. Select Paste translation
To translate an object according to specific coordinates, type the desired coordinates in the column 3 (first line stands for X, second Y, third Z).
The translation will be made according to the object’s UCS reference system.