Registration report dialog
This dialog allows you to refine and exploit the result of a registration. This dialog is used as final step of the following procedures: single-scan georeferencing, georeferencing from point list, and platform calibration.
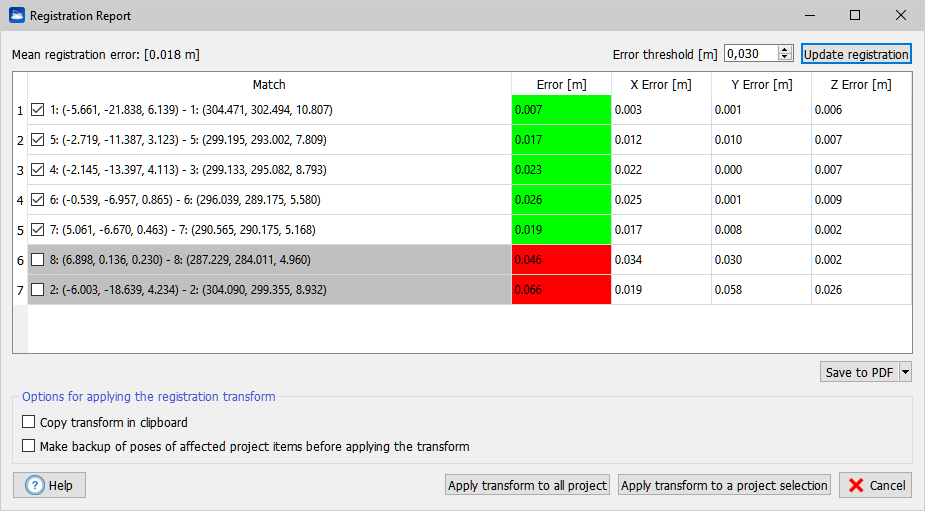
- On top of the dialog, the mean registration error is shown, along with the editable error threshold. Also errors according the current UCS components are shown.
- In the central table of the dialog, the point pairs are shown along with their associated registration errors. Errors above the error threshold are displayed in red, and you could consider the corresponding pair as outlier. If you uncheck an outlier pair, by pressing the checkbox on the left, and press Update registration on top right, the registration will be recomputed without the outlier and the mean registration error will improve.
- In the bottom part of the dialog, there are options on how to make use of the obtained registration. The option Copy transform in clipboard is useful for having a backup of the registration transform to use on project entities that will be created at a successive time. The option Make backup of poses of affected project items before applying the transform will save the poses of the affected project entities in the Exports folder of the project, these poses can be restored later via the matrix transform tool, to undo the effects of the current registration. To access this tool, go to the project window, select the entities you want to register, right-click and choose Registration -> Matrix transform from the context menu.
- The button Apply transform to all project on the bottom extends the effect of the registration to all the project entities. All your project items (including annotations) will be moved according to the rototranslation defined by the registration. The button Apply transform to a project selection will pop up a dialog to select a subset of the project items. Only those selected items will be moved.